第一时间捕获有价值的信号
本文译自 Clayton Farr 的 The Ralph Playbook,这是对 Geoffrey Huntley 提出的 Ralph 方法的深度整理。Ralph 不是一个简单的写代码循环,而是一个完整的漏斗——从想法到 JTBD 对齐的规格,再到全面的实施计划,最后是 Ralph 工作循环。本文将用通俗易懂的方式,带你理解如何让 AI 真正”做自己”,实现高效的自主编程。
那到底该怎么用 Ralph 才最好?
很多人似乎用各种方式都取得了不错的效果,但我想尽可能从那个不仅提出了这个方法,而且花了最多时间实际验证的人那里,读懂其中的细节。
所以我深入研究了最近的视频和 Geoff 的原始文章,想自己搞清楚到底怎么做才最有效。
下面就是结果——一份(可能有点强迫症的)Ralph 操作手册,整理了把这一切付诸实践的各种细节,希望不要在过程中把它的精髓弄丢了。
深入研究这一切也让我想到了一些可能有价值的额外增强方案,这些方案旨在与让 Ralph 如此有效的核心原则保持一致。
目录
Open 目录
工作流
一张图胜过千条推文和一小时视频。Geoff 的这里的概述真的帮我理清了从 1)想法 → 2)单独的 JTBD 对齐的规格 → 3)全面的实施计划 → 4)Ralph 工作循环的工作流细节。
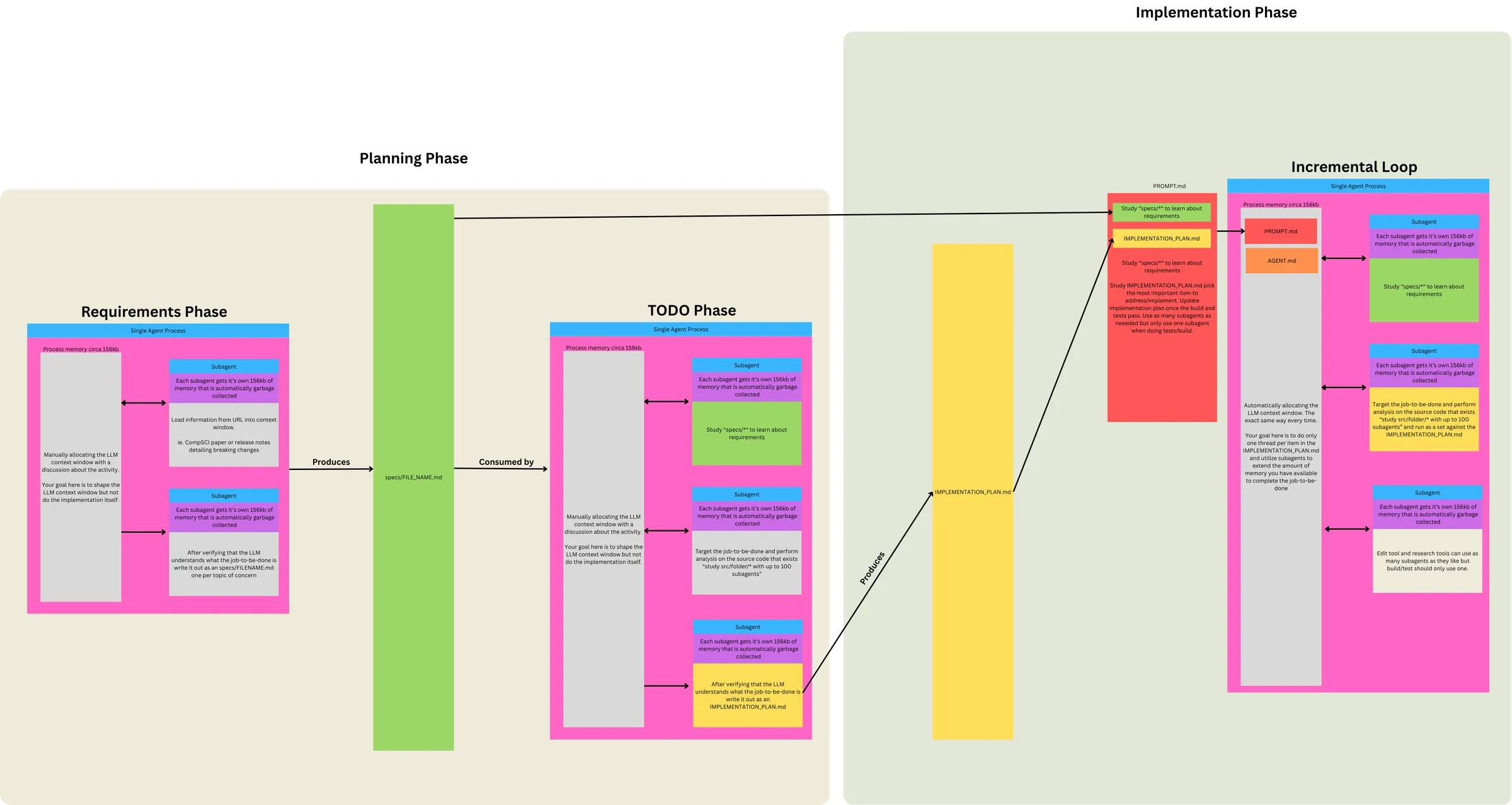
三个阶段,两个提示,一个循环
这张图让我明白,Ralph 不只是”一个写代码的循环”。它是一个漏斗,有 3 个阶段、2 个提示和 1 个循环。
阶段 1. 定义需求(LLM 对话)
- 讨论项目想法 → 识别 Jobs to Be Done (JTBD)
- 将单个 JTBD 拆解为关注点
- 使用子代理从 URL 加载信息到上下文中
- LLM 理解 JTBD 关注点:子代理为每个关注点编写
specs/FILENAME.md
阶段 2 / 3. 运行 Ralph 循环(两种模式,根据需要切换 PROMPT.md)
相同的循环机制,不同的提示用于不同的目标:
| 模式 | 何时使用 | 提示重点 |
|---|---|---|
| 规划 | 没有计划,或计划过时/错误 | 仅生成/更新 IMPLEMENTATION_PLAN.md |
| 构建 | 计划已存在 | 按计划实施,提交,顺便更新计划 |
每种模式的提示差异:
- “规划”提示进行差距分析(规格 vs 代码)并输出优先级待办事项列表——不实施,不提交。
- “构建”提示假设计划已存在,从中选择任务,实施,运行测试(反压),提交。
为什么两种模式都用循环?
- 构建需要它:本质上是迭代的(许多任务 × 新鲜上下文 = 隔离)
- 规划用它是为了一致性:相同的执行模型,虽然通常 1-2 次迭代就完成
- 灵活性:如果计划需要细化,循环允许多次读取自己的输出
- 简单:一个机制搞定一切;清晰的文件 I/O;易于停止/重启
每次迭代加载的上下文: PROMPT.md + AGENTS.md
规划模式循环生命周期:
- 子代理研究
specs/*和现有的/src - 比较规格与代码(差距分析)
- 创建/更新
IMPLEMENTATION_PLAN.md并列出优先级任务 - 不实施任何内容
构建模式循环生命周期:
- 定位 – 子代理研究
specs/*(需求) - 阅读计划 – 研究
IMPLEMENTATION_PLAN.md - 选择 – 选择最重要的任务
- 调查 – 子代理研究相关的
/src(“不要假设没实现”) - 实施 – N 个子代理进行文件操作
- 验证 – 1 个子代理进行构建/测试(反压)
- 更新
IMPLEMENTATION_PLAN.md– 标记任务完成,记录发现/bug - 更新
AGENTS.md– 如果有操作层面的经验 - 提交
- 循环结束 → 上下文清空 → 下一次迭代重新开始
概念
| 术语 | 定义 |
|---|---|
| Job to Be Done (JTBD) | 高层级的用户需求或结果 |
| 关注点 | JTBD 内的一个独立方面/组件 |
| 规格 | 一个关注点的需求文档(specs/FILENAME.md) |
| 任务 | 通过比较规格与代码得出的工作单元 |
关系:
- 1 个 JTBD → 多个关注点
- 1 个关注点 → 1 个规格
- 1 个规格 → 多个任务(规格比任务大)
例子:
- JTBD:“帮助设计师创建情绪板”
- 关注点:图片收集、颜色提取、布局、分享
- 每个关注点 → 一个规格文件
- 每个规格 → 实施计划中的许多任务
关注点范围测试:“一句话不带’和’”
- 你能用一句话描述关注点,而不连接不相关的功能吗?
- ✓ “颜色提取系统分析图片以识别主色调”
- ✗ “用户系统处理认证、资料和账单” → 3 个关注点
- 如果你需要用”和”来描述它的功能,那可能是多个关注点
核心原则
⏳ 上下文就是一切
- 当宣传 200K+ token 时 = 实际可用约 176K
- 而”智能区域”的上下文利用率为 40-60%
- 紧凑的任务 + 每个循环 1 个任务 = 100% 智能区域上下文利用率
这决定并驱动了其他一切:
- 使用主代理/上下文作为调度器
- 不要把昂贵的工作分配给主上下文;尽可能改用子代理
- 使用子代理作为内存扩展
- 每个子代理获得约 156kb,会被垃圾回收
- 分散出去以避免污染主上下文
- 简单和简洁胜出
- 适用于系统中的部件数量、循环配置和内容
- 冗长的输入会降低确定性
- 优先使用 Markdown 而非 JSON
- 为了更好的 token 效率来定义和跟踪工作
🧭 引导 Ralph:模式 + 反压
创建正确的信号和门控来引导 Ralph 成功输出 至关重要。你可以从两个方向引导:
- 从上游引导
- 确保确定性设置:
- 为规格分配前约 5,000 个 token
- 每个循环的上下文都分配相同的文件,这样模型从已知状态开始(
PROMPT.md+AGENTS.md)
- 你现有的代码塑造了使用和生成的内容
- 如果 Ralph 生成错误的模式,添加/更新工具和现有代码模式来引导它走向正确的模式
- 确保确定性设置:
- 从下游引导
- 通过测试、类型检查、lint、构建等创建反压,拒绝无效/不可接受的工作
- 提示泛泛地说”运行测试”。
AGENTS.md指定实际命令,使反压针对特定项目 - 反压可以扩展到代码验证之外:一些验收标准抗拒程序化检查——创意质量、美学、用户体验感觉。LLM 作为法官的测试可以为主观标准提供二进制通过/失败的反压。(下面有关于如何用 Ralph 处理这个的更详细想法)
- 提醒 Ralph 创建/使用反压
- 提醒 Ralph 在实施时使用反压:“重要:在编写文档时,记录原因——测试和实施的重要性。”
🙏 让 Ralph 做自己
Ralph 的有效性来自于你多大程度信任它做正确的事(最终)并培养它这样做的能力。
- 让 Ralph 做自己
- 利用 LLM 自我识别、自我纠正和自我改进的能力
- 适用于实施计划、任务定义和优先级排序
- 通过迭代实现最终一致性
- 使用保护措施
- 为了自主操作,Ralph 需要
--dangerously-skip-permissions——每次工具调用都请求批准会打破循环。这完全绕过了 Claude 的权限系统——所以沙箱成为你唯一的安全边界。 - 理念:“不是会不会被攻破,而是什么时候。以及影响范围有多大?”
- 没有沙箱运行会暴露你机器上的凭证、浏览器 cookie、SSH 密钥和访问令牌
- 在具有最小可行访问权限的隔离环境中运行:
- 只需要任务所需的 API 密钥和部署密钥
- 除了需求外,不访问私人数据
- 尽可能限制网络连接
- 选项:Docker 沙箱(本地)、Fly Sprites/E2B 等(远程/生产)- 附加说明
- 额外的紧急出口:Ctrl+C 停止循环;
git reset --hard还原未提交的更改;如果轨迹出错,重新生成计划
- 为了自主操作,Ralph 需要
🚦 移到循环外面
为了充分利用 Ralph,你需要让开道。Ralph 应该做所有的工作,包括决定下一步实施哪个计划工作以及如何实施。你的工作现在是坐在循环上,而不是在里面——设计设置和环境,让 Ralph 能够成功。
观察和纠正方向——尤其是在早期,坐下来观察。出现了什么模式?Ralph 哪里出错了?他需要什么信号?你开始用的提示不会是你结束用的提示——它们通过观察到的失败模式演变。
像调吉他一样调整它——不是预先规定一切,而是观察和被动调整。当 Ralph 以特定方式失败时,添加一个信号下次帮助他。
但信号不只是提示文本。它们是 Ralph 可以发现的任何东西:
- 提示护栏——明确的指示,如”不要假设没实现”
AGENTS.md——关于如何构建/测试的操作经验- 代码库中的工具——当你添加一个模式时,Ralph 会发现并遵循它
- 其他可发现的、相关的输入……
记住,计划是可丢弃的:
- 如果错了,扔掉它,重新开始
- 重新生成的成本是一个规划循环;与 Ralph 绕圈子相比很便宜
- 在这些情况下重新生成:
- Ralph 偏离轨道(实施错误的东西,重复工作)
- 计划感觉过时或与当前状态不匹配
- 已完成项目的混乱太多
- 你做了重大的规格更改
- 你对实际完成的内容感到困惑
循环机制
外层循环控制
Geoff 最初的最简形式 loop.sh 脚本:
while :; do cat PROMPT.md | claude ; done注意: 同样的方法可以用于其他 CLI;例如 amp、codex、opencode 等。
什么控制任务继续?
继续机制非常简单:
- Bash 循环运行 → 将
PROMPT.md喂给 claude - PROMPT.md 指示 → “研究 IMPLEMENTATION_PLAN.md 并选择最重要的事情”
- 代理完成一个任务 → 更新磁盘上的 IMPLEMENTATION_PLAN.md,提交,退出
- Bash 循环立即重启 → 新鲜的上下文窗口
- 代理读取更新的计划 → 选择下一个最重要的事情
关键见解: IMPLEMENTATION_PLAN.md 文件在迭代之间持久保存在磁盘上,并充当其他隔离循环执行之间的共享状态。每次迭代确定性地加载相同的文件(PROMPT.md + AGENTS.md + specs/*)并从磁盘读取当前状态。
不需要复杂的编排——只是一个不断重启代理的笨拙 bash 循环,代理通过每次读取计划文件来弄清楚下一步该做什么。
内层循环控制(任务执行)
单个任务执行没有硬性技术限制。控制依赖于:
- 范围纪律 - PROMPT.md 指示”一个任务”和”测试通过时提交”
- 反压 - 测试/构建失败强制代理在提交前修复问题
- 自然完成 - 代理在成功提交后退出
Ralph 可能会绕圈子、忽略指示或走错方向——这是预期的,也是调整过程的一部分。当 Ralph”测试你”以特定方式失败时,你向提示添加护栏或调整反压机制。通过观察和迭代,不确定性是可管理的。
增强循环示例
用模式选择(规划/构建)、最大迭代支持和每次迭代后的 git push 包装核心循环。
这个增强使用两个保存的提示文件:
PROMPT_plan.md- 规划模式(差距分析,生成/更新计划)PROMPT_build.md- 构建模式(按计划实施)
#!/bin/bash
# 用法:./loop.sh [plan] [max_iterations]
# 示例:
# ./loop.sh # 构建模式,无限制迭代
# ./loop.sh 20 # 构建模式,最多 20 次迭代
# ./loop.sh plan # 规划模式,无限制迭代
# ./loop.sh plan 5 # 规划模式,最多 5 次迭代
# 解析参数
if [ "$1" = "plan" ]; then
# 规划模式
MODE="plan"
PROMPT_FILE="PROMPT_plan.md"
MAX_ITERATIONS=${2:-0}
elif [[ "$1" =~ ^[0-9]+$ ]]; then
# 带最大迭代的构建模式
MODE="build"
PROMPT_FILE="PROMPT_build.md"
MAX_ITERATIONS=$1
else
# 构建模式,无限制(无参数或无效输入)
MODE="build"
PROMPT_FILE="PROMPT_build.md"
MAX_ITERATIONS=0
fi
ITERATION=0
CURRENT_BRANCH=$(git branch --show-current)
echo "━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━"
echo "模式: $MODE"
echo "提示: $PROMPT_FILE"
echo "分支: $CURRENT_BRANCH"
[ $MAX_ITERATIONS -gt 0 ] && echo "最大: $MAX_ITERATIONS 次迭代"
echo "━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━"
# 验证提示文件存在
if [ ! -f "$PROMPT_FILE" ]; then
echo "错误:$PROMPT_FILE 未找到"
exit 1
fi
while true; do
if [ $MAX_ITERATIONS -gt 0 ] && [ $ITERATION -ge $MAX_ITERATIONS ]; then
echo "已达到最大迭代次数:$MAX_ITERATIONS"
break
fi
# 使用选定的提示运行 Ralph 迭代
# -p:无头模式(非交互,从标准输入读取)
# --dangerously-skip-permissions:自动批准所有工具调用(放手干模式)
# --output-format=stream-json:用于日志/监控的结构化输出
# --model opus:主代理使用 Opus 进行复杂推理(任务选择、优先级排序)
# 如果计划清晰且任务定义明确,可以在构建模式中使用 'sonnet' 以提高速度
# --verbose:详细执行日志
cat "$PROMPT_FILE" | claude -p \
--dangerously-skip-permissions \
--output-format=stream-json \
--model opus \
--verbose
# 每次迭代后推送更改
git push origin "$CURRENT_BRANCH" || {
echo "推送失败。正在创建远程分支..."
git push -u origin "$CURRENT_BRANCH"
}
ITERATION=$((ITERATION + 1))
echo -e "\n\n======================== 循环 $ITERATION ========================\n"
done模式选择:
- 无关键字 → 使用
PROMPT_build.md进行构建(实施) plan关键字 → 使用PROMPT_plan.md进行规划(差距分析,计划生成)
最大迭代:
- 限制外层循环(尝试的任务数量;不是单个任务内的工具调用)
- 每次迭代 = 一个新鲜的上下文窗口 = IMPLEMENTATION_PLAN.md 中的一个任务 = 一次提交
./loop.sh无限制运行(用 Ctrl+C 手动停止)./loop.sh 20最多运行 20 次迭代然后停止
Claude CLI 标志:
-p(无头模式):启用非交互操作,从标准输入读取提示--dangerously-skip-permissions:绕过所有权限提示以进行完全自动化运行--output-format=stream-json:输出结构化 JSON 用于日志/监控/可视化--model opus:主代理使用 Opus 进行任务选择、优先级排序和协调(如果任务清晰,可以使用sonnet以提高速度)--verbose:提供详细的执行日志
文件说明
project-root/
├── loop.sh # Ralph 循环脚本
├── PROMPT_build.md # 构建模式指令
├── PROMPT_plan.md # 规划模式指令
├── AGENTS.md # 每次迭代加载的操作指南
├── IMPLEMENTATION_PLAN.md # 优先级任务列表(由 Ralph 生成/更新)
├── specs/ # 需求规格(每个 JTBD 关注点一个)
│ ├── [jtbd-topic-a].md
│ └── [jtbd-topic-b].md
├── src/ # 应用源代码
└── src/lib/ # 共享工具和组件loop.sh
编排 Ralph 迭代的外层循环脚本。
有关详细的实现示例和配置选项,请参阅循环机制部分。
设置: 在首次使用前使脚本可执行:
chmod +x loop.sh核心功能: 持续将提示文件喂给 claude,管理迭代限制,并在每个任务完成后推送更改。
提示
每个循环迭代的指令集。根据需要在规划和构建版本之间切换。
提示结构:
| 部分 | 目的 |
|---|---|
| 阶段 0 (0a, 0b, 0c) | 定位:研究规格、源位置、当前计划 |
| 阶段 1-4 | 主要指令:任务、验证、提交 |
| 999… 编号 | 护栏/不变量(编号越高 = 越关键) |
关键语言模式(Geoff 的特定措辞):
- “study”(不是”read”或”look at”)
- “don’t assume not implemented”(关键——致命弱点)
- “using parallel subagents” / “up to N subagents”
- “only 1 subagent for build/tests”(反压控制)
- “Think extra hard”(现在是”Ultrathink”)
- “capture the why”
- “keep it up to date”
- “if functionality is missing then it’s your job to add it”
- “resolve them or document them”
PROMPT_plan.md 模板
注意: 更新下面的 [项目特定目标] 占位符。
- 当前的子代理名称假设使用 Claude。
0a. 使用最多 250 个并行 Sonnet 子代理研究 `specs/*` 以了解应用规格。
0b. 研究 @IMPLEMENTATION_PLAN.md(如果存在)以了解到目前为止的计划。
0c. 使用最多 250 个并行 Sonnet 子代理研究 `src/lib/*` 以了解共享工具和组件。
0d. 作为参考,应用源代码在 `src/*` 中。
1. 研究 @IMPLEMENTATION_PLAN.md(如果存在;可能不正确)并使用最多 500 个 Sonnet 子代理研究 `src/*` 中的现有源代码,并将其与 `specs/*` 进行比较。使用 Opus 子代理分析发现、确定任务优先级,并创建/更新 @IMPLEMENTATION_PLAN.md 作为按尚未实施项目的优先级排序的项目符号列表。Ultrathink。考虑搜索 TODO、最小实现、占位符、跳过/不稳定测试和不一致的模式。研究 @IMPLEMENTATION_PLAN.md 以确定研究的起点,并使用子代理保持其更新,标记已完成/未完成的项目。
重要:仅规划。不要实施任何内容。不要假设功能缺失;先用代码搜索确认。将 `src/lib` 视为项目的共享工具和组件标准库。优先考虑那里的整合、惯用实现,而不是临时复制。
最终目标:我们要实现 [项目特定目标]。考虑缺失的元素并相应规划。如果元素缺失,先搜索确认它不存在,然后根据需要在 specs/FILENAME.md 编写规格。如果你创建了一个新元素,那么使用子代理在 @IMPLEMENTATION_PLAN.md 中记录实施它的计划。PROMPT_build.md 模板
注意: 当前的子代理名称假设使用 Claude。
0a. 使用最多 500 个并行 Sonnet 子代理研究 `specs/*` 以了解应用规格。
0b. 研究 @IMPLEMENTATION_PLAN.md。
0c. 作为参考,应用源代码在 `src/*` 中。
1. 你的任务是使用并行子代理按照规格实施功能。遵循 @IMPLEMENTATION_PLAN.md 并选择要处理的最重要项目。在进行更改之前,使用 Sonnet 子代理搜索代码库(不要假设没实现)。你可以使用最多 500 个并行 Sonnet 子代理进行搜索/读取,仅使用 1 个 Sonnet 子代理进行构建/测试。需要复杂推理时使用 Opus 子代理(调试、架构决策)。
2. 在实施功能或解决问题后,运行该改进代码单元的测试。如果功能缺失,那么你的工作是按照应用规格添加它。Ultrathink。
3. 当你发现问题时,立即使用子代理用你的发现更新 @IMPLEMENTATION_PLAN.md。解决后,更新并删除该项目。
4. 当测试通过时,更新 @IMPLEMENTATION_PLAN.md,然后 `git add -A` 然后 `git commit`,提交消息描述更改。提交后,`git push`。
99999. 重要:在编写文档时,记录原因——测试和实施的重要性。
999999. 重要:单一事实来源,无迁移/适配器。如果与你的工作无关的测试失败,将它们作为增量的一部分解决。
9999999. 一旦没有构建或测试错误,创建一个 git tag。如果没有 git tag,从 0.0.0 开始,例如如果 0.0.0 不存在,则补丁递增 1 到 0.0.1。
99999999. 如果需要调试问题,你可以添加额外的日志。
999999999. 使用子代理保持 @IMPLEMENTATION_PLAN.md 更新——未来的工作依赖于此以避免重复工作。特别是在完成你的回合后更新。
9999999999. 当你学到关于如何运行应用的新东西时,使用子代理更新 @AGENTS.md,但保持简洁。例如,如果你在学习正确命令之前多次运行命令,那么应该更新该文件。
99999999999. 对于你注意到的任何 bug,即使与当前工作无关,也要解决它们或使用子代理在 @IMPLEMENTATION_PLAN.md 中记录它们。
999999999999. 完全实施功能。占位符和存根浪费精力和时间重做同样的工作。
9999999999999. 当 @IMPLEMENTATION_PLAN.md 变大时,使用子代理定期从文件中清除已完成的项目。
99999999999999. 如果你在 specs/* 中发现不一致,使用请求'ultrathink'的 Opus 4.5 子代理更新规格。
999999999999999. 重要:保持 @AGENTS.md 仅用于操作——状态更新和进度记录属于 `IMPLEMENTATION_PLAN.md`。臃肿的 AGENTS.md 会污染每个未来循环的上下文。AGENTS.md
单一、规范的”循环核心”——一份简洁、可操作的”如何运行/构建”指南。
- 不是变更日志或进度日记
- 描述如何构建/运行项目
- 捕获改进循环的操作经验
- 保持简洁(约 60 行)
状态、进度和规划属于 IMPLEMENTATION_PLAN.md,不属于这里。
环回 / 即时自我评估:
AGENTS.md 应该包含项目特定的命令,这些命令启用环回——Ralph 在同一循环内立即评估他的工作的能力。这包括:
- 构建命令
- 测试命令(目标和完整套件)
- 类型检查/lint 命令
- 任何其他验证工具
构建提示泛泛地说”运行测试”;AGENTS.md 指定实际命令。这就是反压如何按项目连接的。
示例
## 构建和运行
关于如何构建项目的简洁规则:
## 验证
实施后运行这些以获得即时反馈:
- 测试:`[测试命令]`
- 类型检查:`[类型检查命令]`
- Lint:`[lint 命令]`
## 操作说明
关于如何运行项目的简洁经验:
...
### 代码库模式
...IMPLEMENTATION_PLAN.md
从差距分析(规格 vs 代码)得出的优先级项目符号列表——由 Ralph 生成。
- 通过规划模式创建
- 在构建模式期间更新(标记完成,添加发现,记录 bug)
- 可以重新生成——Geoff:“我已经多次删除 TODO 列表”→ 切换到规划模式
- 自我纠正——构建模式甚至可以在缺失时创建新规格
循环是有意的:通过迭代实现最终一致性。
没有预先指定的模板——让 Ralph/LLM 决定和管理最适合它的格式。
specs/*
每个关注点一个 markdown 文件。这些是应该构建什么的事实来源。
- 在需求阶段创建(人类 + LLM 对话)
- 被规划和构建模式使用
- 如果发现不一致可以更新(很少,使用子代理)
没有预先指定的模板——让 Ralph/LLM 决定和管理最适合它的格式。
src/ 和 src/lib/
应用源代码和共享工具/组件。
在 PROMPT.md 模板中引用以用于定位步骤。
增强方案?
我(Clayton)还在确定这些可能增强方案的价值/可行性,但机会听起来很有希望。
我还在确定这些的价值/可行性,但机会听起来很有希望:
- 使用 Claude 的 AskUserQuestionTool 进行规划 - 使用 Claude 的内置访谈工具系统地澄清 JTBD、边缘情况和规格的验收标准。
- 验收驱动的反压 - 在规划期间从验收标准派生测试需求。防止”作弊”——没有适当的测试通过就不能声称完成。
- 非确定性反压 - 使用 LLM 作为法官对主观任务(语气、美学、用户体验)进行测试。二进制通过/失败审查,迭代直到通过。
- Ralph 友好的工作分支 - 要求 Ralph 在运行时”过滤到功能 X”是不可靠的。相反,预先为每个分支创建范围计划。
- JTBD → 故事地图 → SLC 发布 - 推动”让 Ralph 做自己”的力量,将 JTBD 的受众和活动连接到简单/可爱/完整的发布。
使用 Claude 的 AskUserQuestionTool 进行规划
在阶段 1(定义需求)期间,使用 Claude 的内置 AskUserQuestionTool 通过结构化访谈系统地探索 JTBD、关注点、边缘情况和验收标准,然后再编写规格。
何时使用: 最小/模糊的初始需求,需要澄清约束,或存在多种有效方法。
调用: “使用 AskUserQuestion 采访我以了解 [JTBD/关注点/验收标准/…]”
Claude 会提出有针对性的问题以澄清需求并确保对齐,然后再生成 specs/*.md 文件。
流程:
- 从已知信息开始 →
- Claude 通过 AskUserQuestion 采访 →
- 迭代直到清晰 →
- Claude 编写带有验收标准的规格 →
- 继续规划/构建
不需要代码或提示更改——这只是使用现有 Claude Code 功能增强阶段 1。
灵感 - Thariq 的 X 帖子:
验收驱动的反压
Geoff 的 Ralph隐含地通过涌现迭代连接规格 → 实施 → 测试。这个增强将通过在规划期间派生测试需求使那个连接明确化,创建从”成功是什么样子”到”什么验证它”的直接线路。
这个增强将验收标准(在规格中)直接连接到测试需求(在实施计划中),通过以下方式提高反压质量:
- 防止”不作弊” - 没有从验收标准派生的所需测试就不能声称完成
- 启用 TDD 工作流 - 测试需求在实施开始前已知
- 改进收敛 - 清晰的完成信号(所需测试通过)vs 模糊(“好像完成了?”)
- 保持确定性 - 计划中的测试需求(已知状态)不是涌现的(概率性的)
与核心理念的兼容性
| 原则 | 保持? | 如何 |
|---|---|---|
| 单体操作 | ✓ 是 | 一个代理,一个任务,一次一个循环 |
| 反压至关重要 | ✓ 是 | 测试是机制,只是现在明确派生 |
| 上下文效率 | ✓ 是 | 规划一次决定测试 vs 构建重新发现 |
| 确定性设置 | ✓ 是 | 计划中的测试需求(已知状态)不是涌现的 |
| 让 Ralph 做自己 | ✓ 是 | Ralph 仍然确定优先级并选择实施方法 |
| 计划是可丢弃的 | ✓ 是 | 错误的测试需求?重新生成计划 |
| ”记录原因” | ✓ 是 | 测试意图在实施前记录在计划中 |
| 不作弊 | ✓ 是 | 所需测试防止占位符实施 |
规定性平衡
关键区别:
验收标准(在规格中)= 行为结果、可观察结果、成功是什么样子
- ✓ “从任何上传的图片中提取 5-10 种主色调”
- ✓ “在 <100ms 内处理 <5MB 的图片”
- ✓ “处理边缘情况:灰度、单色、透明背景”
测试需求(在实施计划中)= 从验收标准派生的验证点
- ✓ “所需测试:提取 5-10 种颜色、性能 <100ms、处理灰度边缘情况”
实施方法(由 Ralph 决定)= 关于如何实现它的技术决策
- ❌ “使用 K-means 聚类,3 次迭代和 LAB 颜色空间转换”
关键:指定要验证什么(结果),而不是如何实施(方法)
这保持了”让 Ralph 做自己”原则——Ralph 决定实施细节,同时有清晰的成功信号。
架构:三阶段连接
阶段 1:需求定义
specs/*.md + 验收标准
↓
阶段 2:规划(派生测试需求)
IMPLEMENTATION_PLAN.md + 所需测试
↓
阶段 3:构建(用测试实施)
实施 + 测试 → 反压阶段 1:需求定义
在生成规格的人类 + LLM 对话期间:
- 讨论 JTBD 并拆解为关注点
- 根据需要使用子代理加载外部上下文
- 讨论并定义验收标准——什么可观察、可验证的结果表明成功
- 保持标准是行为的(结果),而不是实施的(如何构建它)
- LLM 编写规格,包括验收标准,以对规格最有意义的方式
- 验收标准成为在规划阶段派生测试需求的基础
阶段 2:规划模式增强
修改 PROMPT_plan.md 指令 1 以包含测试派生。在第一句话后添加:
对于计划中的每个任务,从规格中的验收标准派生所需测试——需要验证哪些特定结果(行为、性能、边缘情况)。测试验证什么有效,而不是如何实施。作为任务定义的一部分包含。阶段 3:构建模式增强
修改 PROMPT_build.md 指令:
指令 1: 在”选择要处理的最重要项目”后添加:
任务包括所需测试——将测试实施为任务范围的一部分。指令 2: 将”运行该代码单元的测试”替换为:
运行任务定义中指定的所有所需测试。在任务被视为完成之前,所有所需测试必须存在并通过。添加新护栏(在 9 序列中):
999. 在提交之前,从验收标准派生的所需测试必须存在并通过。测试是实施范围的一部分,不是可选的。测试驱动开发方法:测试可以先写或与实施一起写。非确定性反压
一些验收标准抗拒程序化验证:
- 创意质量 - 写作语气、叙事流程、参与度
- 美学判断 - 视觉和谐、设计平衡、品牌一致性
- 用户体验质量 - 直观导航、清晰的信息层次
- 内容适当性 - 上下文感知消息传递、受众适配
这些需要类似人类的判断,但在构建循环期间需要反压以满足验收标准。
解决方案: 添加 LLM 作为法官测试作为反压,二进制通过/失败。
LLM 审查是非确定性的(同一工件在不同运行中可能收到不同的判断)。这与 Ralph 理念一致:“在一个不确定的世界中确定性地糟糕。“循环通过迭代提供最终一致性——审查运行直到通过,接受自然方差。
需要创建什么(第一步)
在 src/lib/ 中创建两个文件:
src/lib/
llm-review.ts # 核心夹具——单一函数,简洁 API
llm-review.test.ts # 显示模式的参考示例(Ralph 从这些学习)llm-review.ts - Ralph 发现的二进制通过/失败 API:
interface ReviewResult {
pass: boolean;
feedback?: string; // 仅在 pass=false 时存在
}
function createReview(config: {
criteria: string; // 要评估的内容(行为的、可观察的)
artifact: string; // 文本内容 OR 截图路径
intelligence?: "fast" | "smart"; // 可选,默认为 'fast'
}): Promise<ReviewResult>;多模态支持: 两种智能级别都将使用多模态模型(文本 + 视觉)。工件类型检测是自动的:
- 文本评估:
artifact: "Your content here"→ 作为文本输入路由 - 视觉评估:
artifact: "./tmp/screenshot.png"→ 作为视觉输入路由(检测 .png、.jpg、.jpeg 扩展名)
智能级别(判断质量,而不是能力类型):
fast(默认):快速、经济高效的模型,用于直接评估- 示例:Gemini 3.0 Flash(多模态、快速、便宜)
smart:更高质量的模型,用于细致的美学/创意判断- 示例:GPT 5.1(多模态、更好的判断、更高成本)
夹具实现选择适当的模型。(示例是当前选项,不是要求。)
llm-review.test.ts - 向 Ralph 展示如何使用它(文本和视觉示例):
import { createReview } from "@/lib/llm-review";
// 示例 1:文本评估
test("欢迎消息语气", async () => {
const message = generateWelcomeMessage();
const result = await createReview({
criteria: "消息使用适合设计专业人士的温暖、对话语气,同时清晰传达价值主张",
artifact: message, // 文本内容
});
expect(result.pass).toBe(true);
});
// 示例 2:视觉评估(截图路径)
test("仪表板视觉层次", async () => {
await page.screenshot({ path: "./tmp/dashboard.png" });
const result = await createReview({
criteria: "布局展示清晰的视觉层次,有明显的主要操作",
artifact: "./tmp/dashboard.png", // 截图路径
});
expect(result.pass).toBe(true);
});
// 示例 3:用于复杂判断的智能级别
test("品牌视觉一致性", async () => {
await page.screenshot({ path: "./tmp/homepage.png" });
const result = await createReview({
criteria: "视觉设计保持适合金融服务的专业品牌标识,同时避免企业呆板",
artifact: "./tmp/homepage.png",
intelligence: "smart", // 复杂的美学判断
});
expect(result.pass).toBe(true);
});Ralph 从这些示例学习: 文本和截图都作为工件工作。根据需要评估的内容选择。夹具在内部处理其余部分。
未来可扩展性: 当前设计为简单起见使用单一 artifact: string。如果出现需要多个工件的清晰模式(之前/之后比较、项目间一致性、多视角评估),可以扩展到 artifact: string | string[]。复合截图或连接文本可以处理大多数多项目需求。
与 Ralph 工作流集成
规划阶段 - 更新 PROMPT_plan.md:
在之后:
...研究 @IMPLEMENTATION_PLAN.md 以确定研究的起点,并使用子代理保持其更新,标记已完成/未完成的项目。插入这个:
从验收标准派生测试需求时,识别验证是否需要程序化验证(可测量、可检查)或类似人类的判断(感知质量、语气、美学)。两种类型都是同样有效的反压机制。对于抗拒程序化验证的主观标准,探索 src/lib 以获取非确定性评估模式。构建阶段 - 更新 PROMPT_build.md:
添加新护栏(在 9 序列中):
9999. 创建测试以验证实施满足验收标准,并包括传统测试(行为、性能、正确性)和感知质量测试(对于主观标准,参阅 src/lib 模式)。发现,不是文档: Ralph 在 src/lib 探索(阶段 0c)期间从 llm-review.test.ts 示例学习 LLM 审查模式。不需要 AGENTS.md 更新——代码示例就是文档。
与核心理念的兼容性
| 原则 | 保持? | 如何 |
|---|---|---|
| 反压至关重要 | ✓ 是 | 将反压扩展到非程序化验收 |
| 确定性设置 | ⚠️ 部分 | 计划中的标准(确定性),评估非确定性但通过迭代收敛。为了主观质量有意权衡。 |
| 上下文效率 | ✓ 是 | 夹具通过 src/lib 重用,小测试定义 |
| 让 Ralph 做自己 | ✓ 是 | Ralph 发现模式,选择何时使用,编写标准 |
| 计划是可丢弃的 | ✓ 是 | 审查需求是计划的一部分,如果错误重新生成 |
| 简单胜出 | ✓ 是 | 单一函数,二进制结果,无评分复杂性 |
| 为 Ralph 添加信号 | ✓ 是 | 轻量提示添加,从代码探索学习 |
Ralph 友好的工作分支
关键原则: Geoff 的 Ralph 从单一、可丢弃的计划工作,Ralph 在其中选择”最重要的”。要与 Ralph 一起使用分支同时保持这个模式,你必须在计划创建时确定范围,而不是在任务选择时。
为什么这很重要:
- ❌ 错误方法:创建完整计划,然后要求 Ralph 在运行时”过滤”任务 → 不可靠(70-80%),违反确定性
- ✓ 正确方法:预先为每个工作分支创建范围计划 → 确定性、简单、保持”计划是可丢弃的”
解决方案: 添加一个 plan-work 模式以在当前分支上创建工作范围的 IMPLEMENTATION_PLAN.md。用户创建工作分支,然后用工作重点的自然语言描述运行 plan-work。LLM 使用这个描述来确定计划范围。规划后,Ralph 从这个已经确定范围的计划构建,零语义过滤——只是像往常一样选择”最重要的”。
术语: “工作”有意广泛——它可以描述功能、关注点、重构工作、基础设施更改、bug 修复或任何相关更改的连贯主体。你传递给 plan-work 的工作描述是给 LLM 的自然语言——它可以是散文,不受 git 分支命名规则约束。
设计原则
- ✓ 每个 Ralph 会话在每个分支上单体地_操作于一个工作主体
- ✓ 用户手动创建分支——完全控制命名约定和策略(例如 worktrees)
- ✓ 自然语言工作描述——传递散文给 LLM,不受 git 命名规则约束
- ✓ 在计划创建时确定范围(确定性)而不是任务选择(概率性)
- ✓ 每个分支一个计划——每个分支一个 IMPLEMENTATION_PLAN.md
- ✓ 计划保持可丢弃——当分支错误/过时时重新生成范围计划
- ✓ 循环会话内没有动态分支切换
- ✓ 保持简单和确定性
- ✓ 可选——主分支工作流仍然有效
- ✓ 构建时没有语义过滤——Ralph 只是选择”最重要的”
工作流
1. 完整规划(在主分支上)
./loop.sh plan
# 为整个项目生成完整的 IMPLEMENTATION_PLAN.md2. 创建工作分支
用户执行:
git checkout -b ralph/user-auth-oauth
# 使用你喜欢的任何命名约定创建分支
# 建议:工作分支使用 ralph/* 前缀3. 范围规划(在工作分支上)
./loop.sh plan-work "带有 OAuth 和会话管理的用户认证系统"
# 传递自然语言描述——LLM 使用这个来确定计划范围
# 创建仅包含此工作任务的重点 IMPLEMENTATION_PLAN.md4. 从计划构建(在工作分支上)
./loop.sh
# Ralph 从范围计划构建(不需要过滤)
# 从已经确定范围的计划中选择最重要的任务5. PR 创建(工作完成时)
用户执行:
gh pr create --base main --head ralph/user-auth-oauth --fill工作范围循环脚本
扩展基础增强循环脚本以添加带有范围规划的工作分支支持:
#!/bin/bash
set -euo pipefail
# 用法:
# ./loop.sh [plan] [max_iterations] # 在当前分支上规划/构建
# ./loop.sh plan-work "work description" # 在当前分支上创建范围计划
# 示例:
# ./loop.sh # 构建模式,无限制
# ./loop.sh 20 # 构建模式,最多 20
# ./loop.sh plan 5 # 完整规划,最多 5
# ./loop.sh plan-work "user auth" # 范围规划
# 解析参数
MODE="build"
PROMPT_FILE="PROMPT_build.md"
if [ "$1" = "plan" ]; then
# 完整规划模式
MODE="plan"
PROMPT_FILE="PROMPT_plan.md"
MAX_ITERATIONS=${2:-0}
elif [ "$1" = "plan-work" ]; then
# 范围规划模式
if [ -z "$2" ]; then
echo "错误:plan-work 需要工作描述"
echo "用法:./loop.sh plan-work \"工作描述\""
exit 1
fi
MODE="plan-work"
WORK_DESCRIPTION="$2"
PROMPT_FILE="PROMPT_plan_work.md"
MAX_ITERATIONS=${3:-5} # 工作规划默认为 5
elif [[ "$1" =~ ^[0-9]+$ ]]; then
# 带最大迭代的构建模式
MAX_ITERATIONS=$1
else
# 构建模式,无限制
MAX_ITERATIONS=0
fi
ITERATION=0
CURRENT_BRANCH=$(git branch --show-current)
# 为 plan-work 模式验证分支
if [ "$MODE" = "plan-work" ]; then
if [ "$CURRENT_BRANCH" = "main" ] || [ "$CURRENT_BRANCH" = "master" ]; then
echo "错误:plan-work 应该在工作分支上运行,而不是 main/master"
echo "先创建工作分支:git checkout -b ralph/your-work"
exit 1
fi
echo "━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━"
echo "模式: plan-work"
echo "分支: $CURRENT_BRANCH"
echo "工作: $WORK_DESCRIPTION"
echo "提示: $PROMPT_FILE"
echo "计划: 将创建范围 IMPLEMENTATION_PLAN.md"
[ "$MAX_ITERATIONS" -gt 0 ] && echo "最大: $MAX_ITERATIONS 次迭代"
echo "━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━"
# 警告 IMPLEMENTATION_PLAN.md 的未提交更改
if [ -f "IMPLEMENTATION_PLAN.md" ] && ! git diff --quiet IMPLEMENTATION_PLAN.md 2>/dev/null; then
echo "警告:IMPLEMENTATION_PLAN.md 有将被覆盖的未提交更改"
read -p "继续?[y/N] " -n 1 -r
echo
[[ ! $REPLY =~ ^[Yy]$ ]] && exit 1
fi
# 导出工作描述给 PROMPT_plan_work.md
export WORK_SCOPE="$WORK_DESCRIPTION"
else
# 正常规划/构建模式
echo "━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━"
echo "模式: $MODE"
echo "分支: $CURRENT_BRANCH"
echo "提示: $PROMPT_FILE"
echo "计划: IMPLEMENTATION_PLAN.md"
[ "$MAX_ITERATIONS" -gt 0 ] && echo "最大: $MAX_ITERATIONS 次迭代"
echo "━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━"
fi
# 验证提示文件存在
if [ ! -f "$PROMPT_FILE" ]; then
echo "错误:$PROMPT_FILE 未找到"
exit 1
fi
# 主循环
while true; do
if [ "$MAX_ITERATIONS" -gt 0 ] && [ $ITERATION -ge "$MAX_ITERATIONS" ]; then
echo "已达到最大迭代次数:$MAX_ITERATIONS"
if [ "$MODE" = "plan-work" ]; then
echo ""
echo "━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━"
echo "已创建范围计划:$WORK_DESCRIPTION"
echo "要构建,运行:"
echo " ./loop.sh 20"
echo "━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━"
fi
break
fi
# 使用选定的提示运行 Ralph 迭代
# -p:无头模式(非交互,从标准输入读取)
# --dangerously-skip-permissions:自动批准所有工具调用(放手干模式)
# --output-format=stream-json:用于日志/监控的结构化输出
# --model opus:主代理使用 Opus 进行复杂推理(任务选择、优先级排序)
# 如果计划清晰且任务定义明确,可以在构建模式中使用 'sonnet' 以提高速度
# --verbose:详细执行日志
# 对于 plan-work 模式,在管道传输之前替换提示中的 ${WORK_SCOPE}
if [ "$MODE" = "plan-work" ]; then
envsubst < "$PROMPT_FILE" | claude -p \
--dangerously-skip-permissions \
--output-format=stream-json \
--model opus \
--verbose
else
cat "$PROMPT_FILE" | claude -p \
--dangerously-skip-permissions \
--output-format=stream-json \
--model opus \
--verbose
fi
# 推送到当前分支
CURRENT_BRANCH=$(git branch --show-current)
git push origin "$CURRENT_BRANCH" || {
echo "推送失败。正在创建远程分支..."
git push -u origin "$CURRENT_BRANCH"
}
ITERATION=$((ITERATION + 1))
echo -e "\n\n======================== 循环 $ITERATION ========================\n"
donePROMPT_plan_work.md 模板
注意: 与 PROMPT_plan.md 相同,但带有范围指令和 WORK_SCOPE 环境变量替换(由循环脚本自动执行)。
0a. 使用最多 250 个并行 Sonnet 子代理研究 `specs/*` 以了解应用规格。
0b. 研究 @IMPLEMENTATION_PLAN.md(如果存在)以了解到目前为止的计划。
0c. 使用最多 250 个并行 Sonnet 子代理研究 `src/lib/*` 以了解共享工具和组件。
0d. 作为参考,应用源代码在 `src/*` 中。
1. 你正在为工作创建一个范围实施计划:"${WORK_SCOPE}"。研究 @IMPLEMENTATION_PLAN.md(如果存在;可能不正确)并使用最多 500 个 Sonnet 子代理研究 `src/*` 中的现有源代码,并将其与 `specs/*` 进行比较。使用 Opus 子代理分析发现、确定任务优先级,并创建/更新 @IMPLEMENTATION_PLAN.md 作为按尚未实施项目的优先级排序的项目符号列表。Ultrathink。考虑搜索 TODO、最小实现、占位符、跳过/不稳定测试和不一致的模式。研究 @IMPLEMENTATION_PLAN.md 以确定研究的起点,并使用子代理保持其更新,标记已完成/未完成的项目。
重要:这仅针对"${WORK_SCOPE}"的范围规划。创建仅包含与此工作范围直接相关的任务的计划。保守——如果不确定任务是否属于此工作,排除它。如果太窄可以重新生成计划。仅规划。不要实施任何内容。不要假设功能缺失;先用代码搜索确认。将 `src/lib` 视为项目的共享工具和组件标准库。优先考虑那里的整合、惯用实现,而不是临时复制。
最终目标:我们要实现范围工作"${WORK_SCOPE}"。考虑与此工作相关的缺失元素并相应规划。如果元素缺失,先搜索确认它不存在,然后根据需要在 specs/FILENAME.md 编写规格。如果你创建了一个新元素,那么使用子代理在 @IMPLEMENTATION_PLAN.md 中记录实施它的计划。与核心理念的兼容性
| 原则 | 保持? | 如何 |
|---|---|---|
| 单体操作 | ✓ 是 | Ralph 仍作为分支内的单个进程操作 |
| 每个循环一个任务 | ✓ 是 | 未更改 |
| 新鲜上下文 | ✓ 是 | 未更改 |
| 确定性 | ✓ 是 | 在计划创建时确定范围(确定性),而不是运行时(概率) |
| 简单 | ✓ 是 | 可选增强,主工作流仍然有效 |
| 计划驱动 | ✓ 是 | 每个分支一个 IMPLEMENTATION_PLAN.md |
| 单一事实来源 | ✓ 是 | 每个分支一个计划——范围计划替换分支上的完整计划 |
| 计划是可丢弃的 | ✓ 是 | 随时重新生成范围计划:./loop.sh plan-work "工作描述" |
| Markdown 优于 JSON | ✓ 是 | 仍然是 markdown 计划 |
| 让 Ralph 做自己 | ✓ 是 | Ralph 从已经确定范围的计划中选择”最重要的”——没有过滤 |
JTBD → 故事地图 → SLC 发布
关注点 → 活动
Geoff 的建议工作流已经将规划与 Jobs-to-Be-Done 对齐——将 JTBD 拆解为关注点,这些关注点反过来成为规格。我喜欢这个,而且我认为有机会通过将关注点重新定义为活动来进一步利用这种方法提供的产品优势。
{kind=link}
活动是旅程中的动词(“上传照片”、“提取颜色”),而不是能力(“颜色提取系统”)。它们自然地由用户意图确定范围。
关注点:“颜色提取”、“布局引擎” → 能力导向 活动:“上传照片”、“看到提取的颜色”、“安排布局” → 旅程导向
活动 → 用户旅程
活动——及其组成步骤——自然地序列化为用户流程,创建一个旅程结构,使差距和依赖关系可见。一个*用户故事地图*将活动组织为列(旅程骨干),能力深度为行——可以构建的完整空间:
上传 → 提取 → 安排 → 分享
基础 自动 手动 导出
批量 调色板 模板 协作
批处理 AI 主题 自动布局 嵌入用户旅程 → 发布切片
通过地图的水平切片成为候选发布。不是每个活动在每个发布中都需要新能力——一些单元格保持空白,如果切片仍然连贯那没关系:
上传 → 提取 → 安排 → 分享
发布 1: 基础 自动 导出
───────────────────────────────────────────────────
发布 2: 调色板 手动
───────────────────────────────────────────────────
发布 3: 批量 AI 主题 模板 嵌入发布切片 → SLC 发布
故事地图给你切片的结构。Jason Cohen 的*简单、可爱、完整 (SLC)给你什么构成一个好切片的标准*:
- 简单——范围狭窄,你可以快速发布。不是每个活动,不是每个深度。
- 完整——在该范围内完全完成一项工作。不是一个破碎的预览。
- 可爱——人们真的想用它。在其边界内令人愉悦。
为什么 SLC 胜过 MVP? MVP 以牺牲客户为代价优化学习——“最小”通常意味着破碎或令人沮丧。SLC 翻转了这个:在交付真正价值的同时在市场中学习。如果成功,你有选择权。如果失败,你仍然善待了用户。
每个切片都可以成为具有清晰价值和标识的发布:
上传 → 提取 → 安排 → 分享
调色板选择器: 基础 自动 导出
───────────────────────────────────────────────────
情绪板: 调色板 手动
───────────────────────────────────────────────────
设计工作室: 批量 AI 主题 模板 嵌入- 调色板选择器 ——上传、提取、导出。从第一天起即时价值。
- 情绪板 ——添加安排。创意表达进入旅程。
- 设计工作室 ——专业功能:批处理、AI 主题、可嵌入输出。
用 Ralph 实施
上面的概念——活动、故事地图、SLC 发布——是思考工具。我们如何将它们转化为 Ralph 的工作流?
默认 Ralph 方法:
- 定义需求:人类 + LLM 定义 JTBD 关注点 →
specs/*.md - 创建任务计划:LLM 分析所有规格 + 当前代码 →
IMPLEMENTATION_PLAN.md - 构建:Ralph 针对完整范围构建
这对于能力导向的工作(功能、重构、基础设施)效果很好。但它不会自然地产生有价值的(SLC)产品发布——它产生”规格描述的任何东西”。
活动 → SLC 发布方法:
为了获得 SLC 发布,我们需要将活动建立在受众上下文中。受众定义谁有 JTBD,这反过来告知什么活动重要以及”可爱”意味着什么。
受众(谁)
└── 有 JTBD(为什么)
└── 通过活动实现(如何)工作流
I. 需求阶段(2 步):
仍然在与人类的 LLM 对话中执行,类似于默认的 Ralph 方法。
-
定义受众及其 JTBD ——我们为谁构建,他们想要什么结果?
- 人类 + LLM 讨论并确定受众及其 JTBD(他们想要的结果)
- 可能包含多个连接的受众(例如”设计师”创建,“客户”审查)
- 生成
AUDIENCE_JTBD.md
-
定义活动 ——用户做什么来完成他们的 JTBD?
- 由
AUDIENCE_JTBD.md告知 - 对于每个 JTBD,识别完成它所需的活动
- 对于每个活动,确定:
- 能力深度(基础 → 增强)——复杂程度
- 每个深度的期望结果——成功是什么样子?
- 生成
specs/*.md(每个活动一个)
活动内的离散步骤是隐式的,LLM 可以在规划期间推断它们。
- 由
II. 规划阶段:
在带有更新的规划提示的 Ralph 循环中执行。
- LLM 分析:
AUDIENCE_JTBD.md(谁,期望结果)specs/*(可以构建什么)- 当前代码状态(存在什么)
- LLM 确定下一个 SLC 切片(哪些活动,在什么能力深度)并规划该切片的任务
- LLM 生成
IMPLEMENTATION_PLAN.md - 人类验证 构建前的计划:
- 范围是否代表一个连贯的 SLC 发布?
- 正确的活动是否以正确的深度包含?
- 如果错误 → 重新运行规划循环以重新生成计划,可选更新输入或规划提示
- 如果正确 → 继续构建
III. 构建阶段:
在带有标准构建提示的 Ralph 循环中执行。
更新的规划提示
PROMPT_plan.md 的变体,添加受众上下文和 SLC 导向的切片推荐。
注意:
- 与默认模板不同,这没有
[项目特定目标]占位符——目标是隐式的:为受众推荐最有价值的下一个发布。 - 当前的子代理名称假设使用 Claude。
0a. 研究 @AUDIENCE_JTBD.md 以了解我们为谁构建以及他们的 Jobs to Be Done。
0b. 使用最多 250 个并行 Sonnet 子代理研究 `specs/*` 以学习 JTBD 活动。
0c. 研究 @IMPLEMENTATION_PLAN.md(如果存在)以了解到目前为止的计划。
0d. 使用最多 250 个并行 Sonnet 子代理研究 `src/lib/*` 以了解共享工具和组件。
0e. 作为参考,应用源代码在 `src/*` 中。
1. 将 `specs/*` 中的活动排序为 @AUDIENCE_JTBD.md 中受众的用户旅程地图。考虑活动如何相互流动以及存在什么依赖关系。
2. 确定下一个 SLC 发布。使用最多 500 个 Sonnet 子代理比较 `src/*` 与 `specs/*`。使用 Opus 子代理分析发现。Ultrathink。鉴于已经实施的内容,推荐哪些活动(在什么能力深度)形成最有价值的下一个发布。优先选择薄水平切片——仍然交付真正价值的最窄范围。一个好的切片是简单(狭窄、可实现)、可爱(人们想用它)和完整(完全完成一项有意义的工作,而不是破碎的预览)。
3. 使用 Opus 子代理(ultrathink)分析和综合发现、确定任务优先级,并创建/更新 @IMPLEMENTATION_PLAN.md 作为为推荐的 SLC 发布尚未实施的项目按优先级排序的项目符号列表。以推荐的 SLC 发布摘要开始计划(包含什么以及为什么),然后列出该范围的优先级任务。考虑 TODO、占位符、最小实现、跳过测试——但范围限于发布。将范围外的发现记录为未来工作。
重要:仅规划。不要实施任何内容。不要假设功能缺失;先用代码搜索确认。将 `src/lib` 视为项目的共享工具和组件标准库。优先考虑那里的整合、惯用实现,而不是临时复制。
最终目标:我们要为 @AUDIENCE_JTBD.md 中的受众实现最有价值的下一个发布。考虑缺失元素并相应规划。如果元素缺失,先搜索确认它不存在,然后根据需要在 specs/FILENAME.md 编写规格。如果你创建了一个新元素,那么使用子代理在 @IMPLEMENTATION_PLAN.md 中记录实施它的计划。备注
为什么 AUDIENCE_JTBD.md 作为单独的工件:
- 单一事实来源——防止规格间漂移
- 启用整体推理:“这个受众最需要什么?”
- JTBD 与受众一起捕获(“为什么”与”谁”在一起)
- 被引用两次:在规格创建期间 AND SLC 规划期间
- 保持活动规格专注于什么,而不重复谁
基数:
- 一个受众 → 许多 JTBD(“设计师”有”捕捉空间”、“探索概念”、“向客户展示”)
- 一个 JTBD → 许多活动(“捕捉空间”包括上传、测量、房间检测)
- 一个活动 → 可以服务多个 JTBD(“上传照片”服务于”捕捉”和”收集灵感”)